Zu aller erst: Ich weiß, ich weiß. Roboter waren vor 30 Jahren vielleicht noch etwas besonderes und gibt es heute im Überfluss. Aber über die Jahre hat sich ganz schön was verändert. Auf der einen Seite sind sie, wie so viele Sachen in den letzten Jahren, endlich „günstig“ geworden und jeder der will kann sich einen zulegen; auf der anderen Seite sind sie aber auch um einiges leichter geworden zu programmieren. Also sind Roboter kurzgesagt DER Einstieg für alle Leute die mit Programmieren anfangen wollen aber keine Lust haben immer nur irgendeine nervige Software zu entwickeln. Quasi etwas das Hard- und Software vereint.
Als gäbe es nicht schon tausende Bausätze mit denen man sofort loslegen kann stelle ich heute eine weitere Möglichkeit vor: Der SMARS modular robot.
SMARS? Ein Schokoriegel oder was?
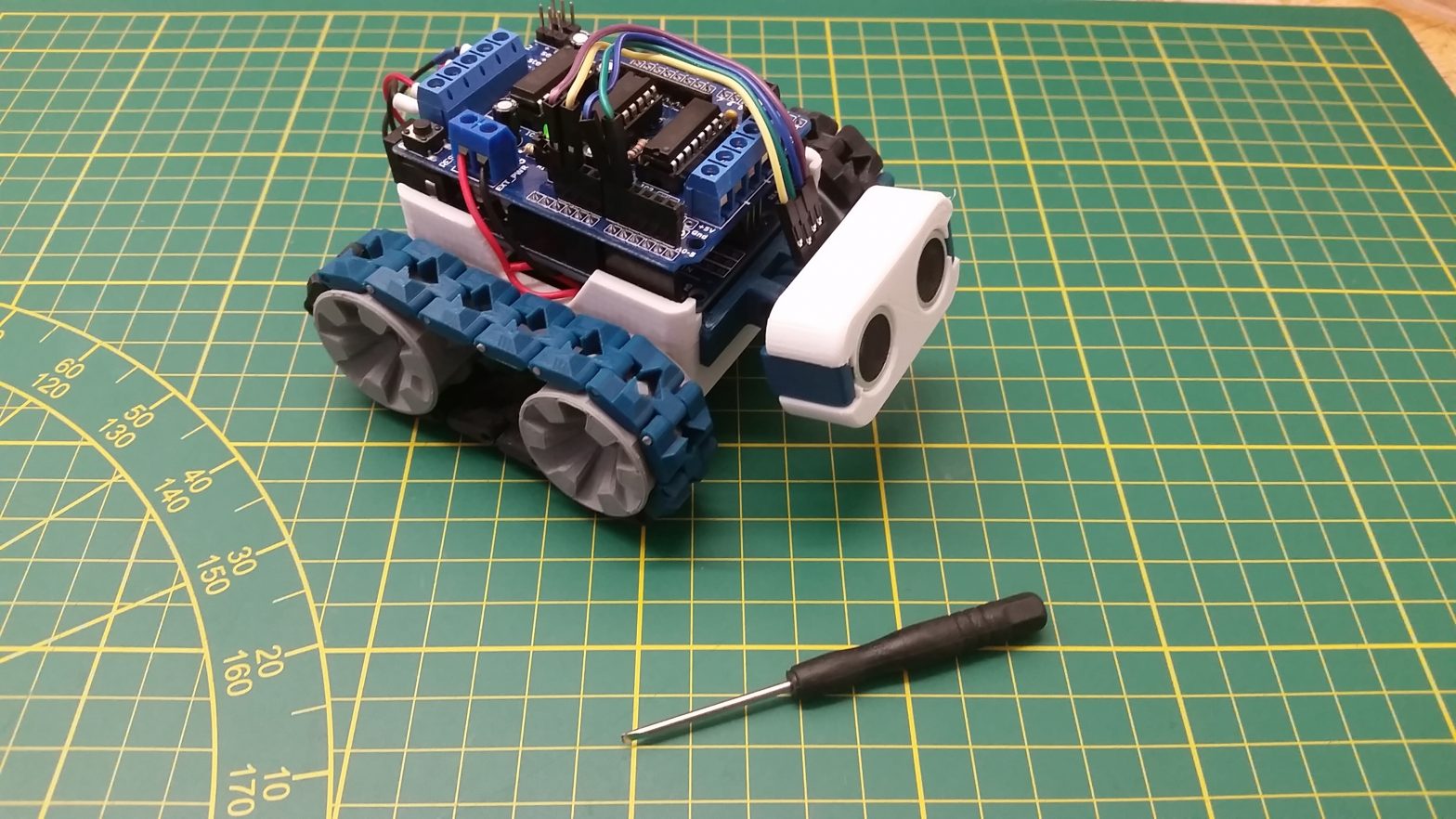
SMARS steht für nichts anderes als „Screwless Modular Assemblable Robotic System“ und ist ein kleiner, knuffiger 3D-druckbarer Roboter der für Bildungszwecke / Schulklassen / Workshops entwickelt wurde und für den auf Grund seines simplen Aufbaus und des einfachen Designs absolut keine Vorkenntnisse benötigt werden. Das Gehäuse mit ein paar Erweiterungen ist kostenlos zum Download verfügbar. Lediglich der Elektronik-Krimskrams muss bestellt werden. Und wer denkt, dass hier der Hund begraben ist und die große böse Kostenfalle hier lauert der kann aufatmen: Die ganzen Bauteile kann man problemlos für ca. 15€ aus China bestellen. Für den Verwendungszweck also das Einsatzgebiet von dem Krabbler ist das natürlich optimal. Anstatt einen teuren Roboter anzuschleppen, der am Ende der Veranstaltung wieder mitgenommen wird können hier die Teilnehmer den Roboter selber bauen, programmieren und last but not least mit nach Hause nehmen und weiter basteln. Und für den Preis bekommt man nichts vergleichbares.
Genug Theorie! Bauen wir das Ding!
Die Bauteile hab ich aus China bestellt. Dauert zwar eine gefühlte Ewigkeit, tut dem Geldbeutel aber gut. Währenddessen hab ich angefangen das Gehäuse, Räder und Ketten zu drucken. (Allerdings habe ich mich für die Variante entschieden, die die Räder ohne Motor mit Schrauben befestigt, da diese aus meiner Sicht bestimmt länger haltbar ist, weniger Reibungswiderstand hat, sich die Räder weniger abnutzen, und der Motor weniger Strom verbraucht. Also waren noch zwei Schrauben + Muttern von nöten. Aber das nur am Rande.) Das schöne an dem Design ist, dass man für die einzelnen Bauteile natürlich auch einzelne Farben benutzen kann und seinem Roboter so einen einzigartigen Look verleiht. Ich hab mich für ein weißes Gehäuse, graue Räder und ozeanblaue Akzente entschieden. Jetzt wo wir alle Bauteile haben sind wir mit der Vorbereitung fertig.
Electronics ’n‘ Stuff
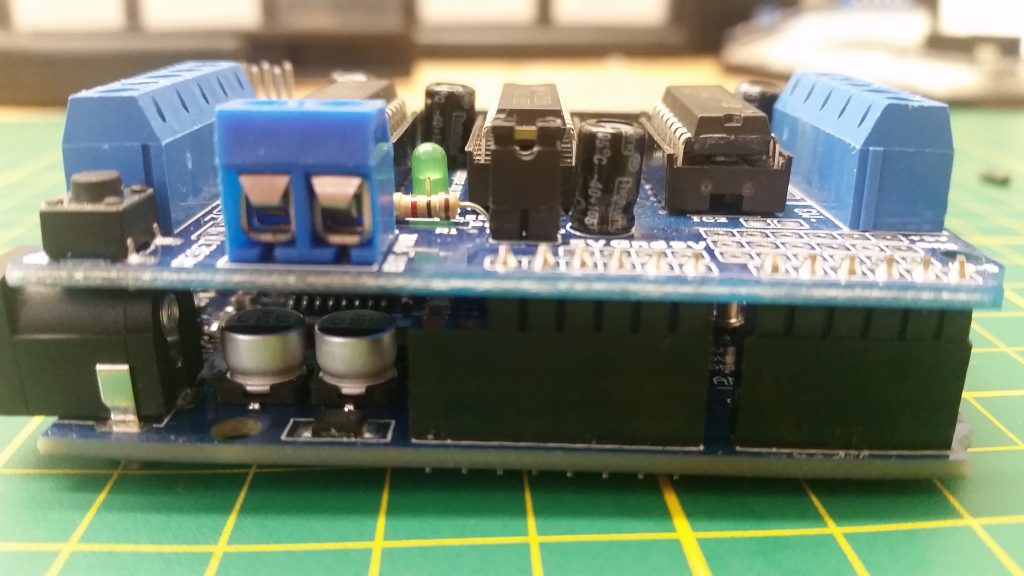
Für das Gehirn von unserem Roboter brauchen wir ein Arduino-Board und um die Motoren anzusteuern ein sog. „Motor-Shield“.
Ein Shield ist nichts anderes als eine weitere Platine die auf das Arduino-Board drauf gesteckt wird und dem Board neue funktionen gibt. Also quasi ein Elektronik-Sandwich. Das Arduino-Board ist eine Platine mit einem Mikrocontroller, auf dem später das Programm gespeichert wird. Also ist unsere Steuerungs-Einheit komplett.
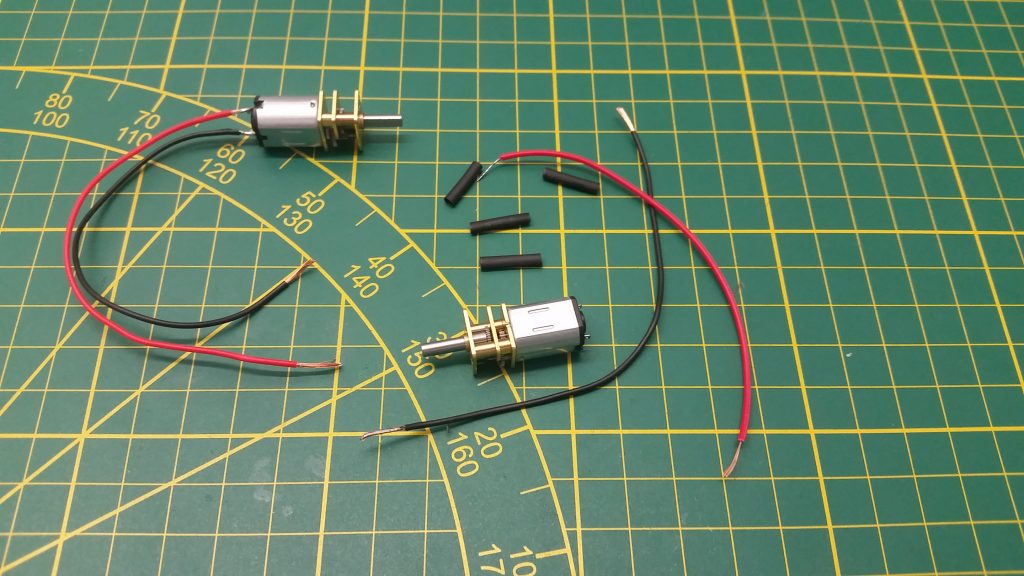
Als nächstes kommen die Motoren dran. Das sind relativ kleine N20 Getriebemotoren die wir später an das Motor-Shield anschließen. Der Entwickler von dem Roboter benutzt Motoren mit 150 RPM (=Umdrehungen in der Minute). Da ich aber schon beim lesen wusste, dass mir das definitv zu langsam ist hab ich mich zuerst für 500er entschieden, die ich aber später wieder ausbauen musste da sie nicht genug Kraft hatten. 300er funktionieren optimal.
Einen Ultraschall-Sensor brauchen wir auch. Der teilt dem Arduino dann mit wenn er kurz davor ist in eine Wand hinein zu rasen.
Die einzige Lötarbeit die wir hier hinter uns bringen müssen ist, die Kabel an die Motoren anzulöten und ggf. eine Leiste mit Buchsen auf dem Motorshield zu befestigen. Das ist aber definitiv kein Witchcraft.
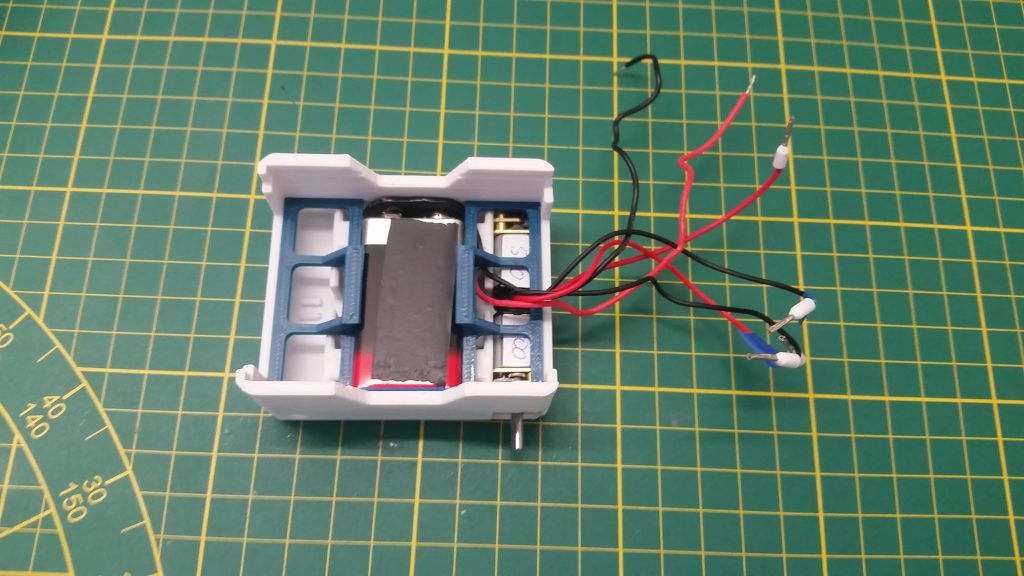
Fehlt nurnoch der Saft. Eine 9V Batterie die wir im Bauch vom Roboter verstecken reicht dicke. Funktioniert halt wie naja – eine Batterie.
Basteln wir alles zusammen…
Als erstes hab ich das Gehäuse genommen und die Motoren eingebaut. Bei der Version MIT Schrauben kann man sich aussuchen wo man sie platzieren will. Selbstverständlich hab ich mich für Heckantrieb entschieden und die Motoren einfach in das Gehäuse reingelickt. Hält erstaunlich gut.
Danach hab ich die Räder auf die Motoren gesteckt und die anderen Räder mit den Schrauben befestigt. Als nächstes hab ich die Kettenglieder zusammen gesteckt und um die Reifen gewickelt. Leider waren die Kettenglieder etwas zu klein und es hat nichts gepasst. Die Lösung für mich war, ein paar von denen einfach 2% größer zu drucken. Perfekt.
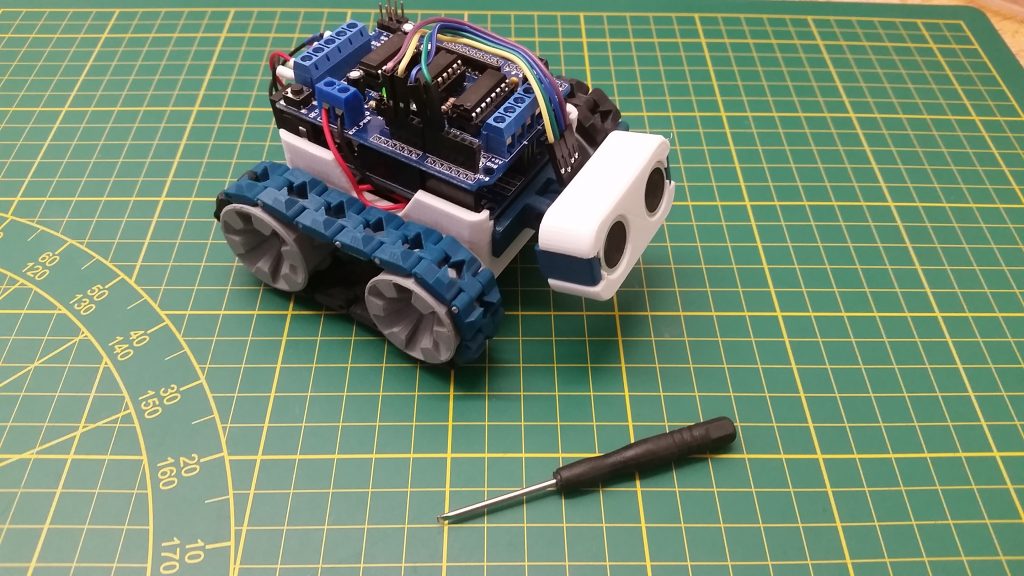
Anschließend hab ich die 9V-Batterie mit einem Stecker versehen und mit den Haltern im Gehäuse befestigt und als alles fertig war mein Platinen-Sandwich mit Arduino und Motor-Shield befestigt. Danach können die Motoren angeschlossen werden.
Zum Schluss hab ich dann noch den Ultraschall-Sensor in das dazugehörige Gehäuse gestopft und angeschlossen.
Programmieren…?
Tutorials wie man einen Arduino programmiert gibt es wie Sand am Meer. Ich hab jedenfalls das Beispiel-Programm auf den Arduino geladen und ehe ich mich versah raste der SMARS los und tat was wir ihm im Programm befohlen haben.
Wie geht es weiter?
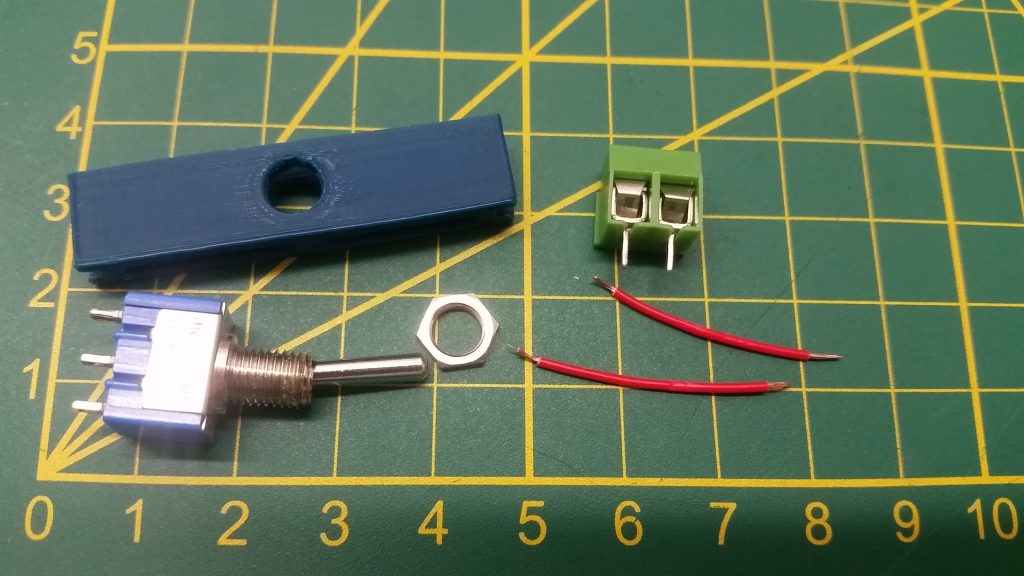
Der SMARS ist an sich echt super zum lernen, bla bla bla. Hier und da lässt das Design zu wünschen übrig. Also hab ich die Zügel selbst in die Hand genommen und ein paar alternative Dateien und Mods auf myMiniFactory veröffentlicht die zum Beispiel die Getriebe von Kontakt mit Kabeln schützen oder einen An/Aus-Schalter hinzufügen.
Teileliste
Für den Fall, dass du jetzt neugierig geworden bist und auch anfangen willst zu basteln hab ich hier eine Liste mit den Teilen die du brauchst.
Wenn du keinen 3D-Drucker hast kannst du in deinem Freundeskreis fragen oder zu einem deiner regionalen MakerSpaces gehen (z.B. Bonn).
| Was? | Wo? |
|---|---|
| 1x SMARS Modell | https://bit.ly/2KjJCJf |
| 2x N20 Getriebemotor 6V 300 RPM | https://amzn.to/3orfQTm |
| 1x Arduino Motor-Shield | https://amzn.to/341QeUB |
| 1x Arduino Uno | https://amzn.to/3dM1l8M oder https://amzn.to/2R1DV5w |
| 1x Ultraschall-Sensor | https://amzn.to/2UV562S |
| 4x Dupont-Kabel | https://amzn.to/2xDv96T |
| 30cm Litze (oder Dupont Kabel verwenden) | https://amzn.to/39zWZyn |
| 9V Batterie | https://amzn.to/3bzRdhw |
| 9V-Stecker | https://amzn.to/2xBTDNU |
| 2x M4x25 Schraube | https://amzn.to/2w4dvZA |
| 2x M4 Sicherungsmutter | https://amzn.to/2My0wqQ |
Sofern du mich unterstützen möchtest dann kannst du gerne ein paar der Bauteile (zum Beispiel die Schrauben da die aus Deutschland günstiger sind) über Amazon bestellen. Dadurch erhalte ich eine Provision und du hilfst mir dabei, den Laden hier am Laufen zu halten. Dadurch ändert sich natürlich nichts am Preis. 🙂
Wenn du jetzt noch Fragen hast, dann ab in die Kommentare damit!